Elastic LiDAR Fusion: Dense Map-Centric Continuous-Time SLAM
Published:
- Accepted as a poster at ICRA, 22 May, 2018
- Accepted as a oral presentation at Australasian Conference on Robotics and Automation (ACRA), 13 December, 2017
Demovideo
Spotlight Video with narration
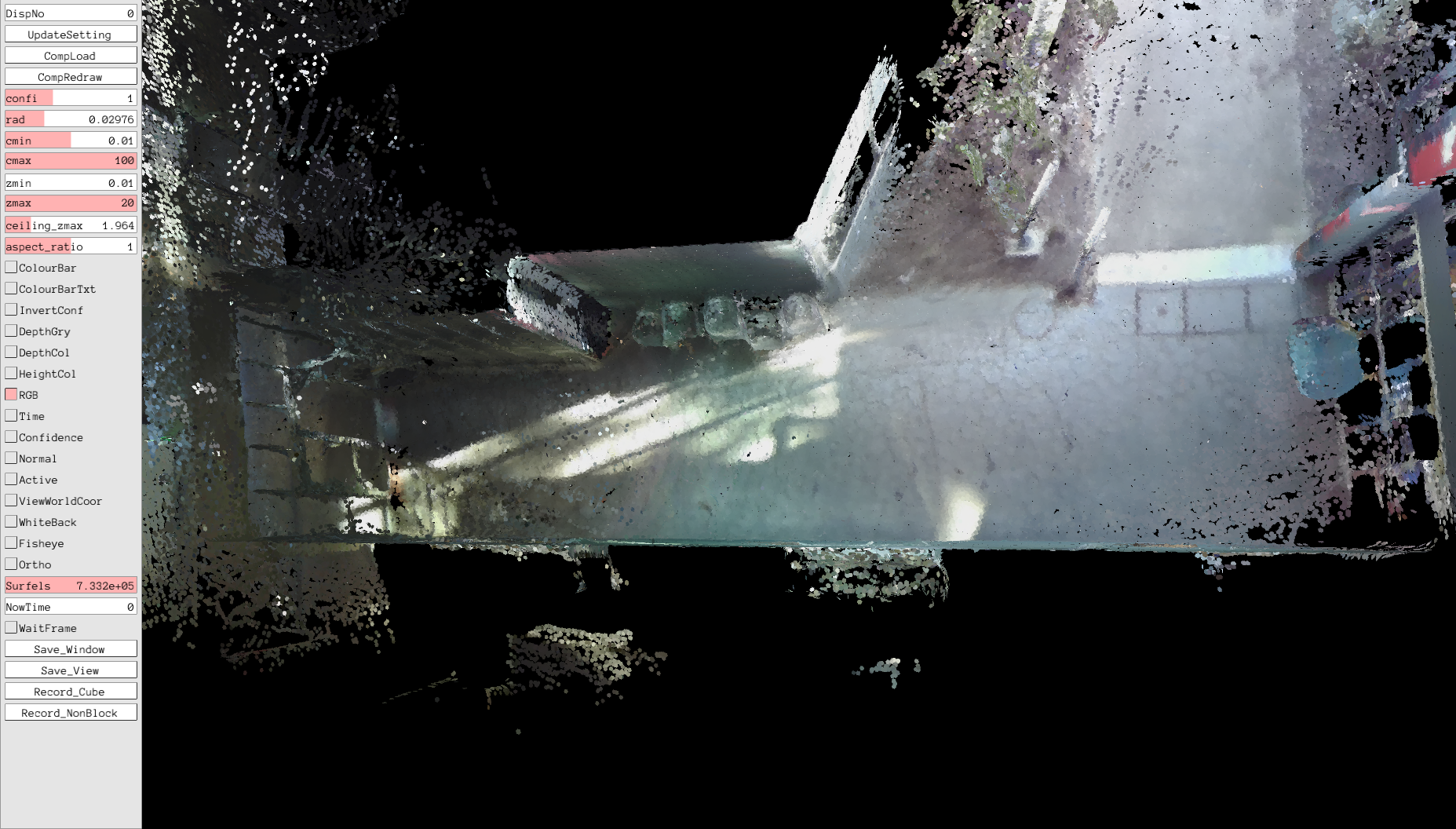
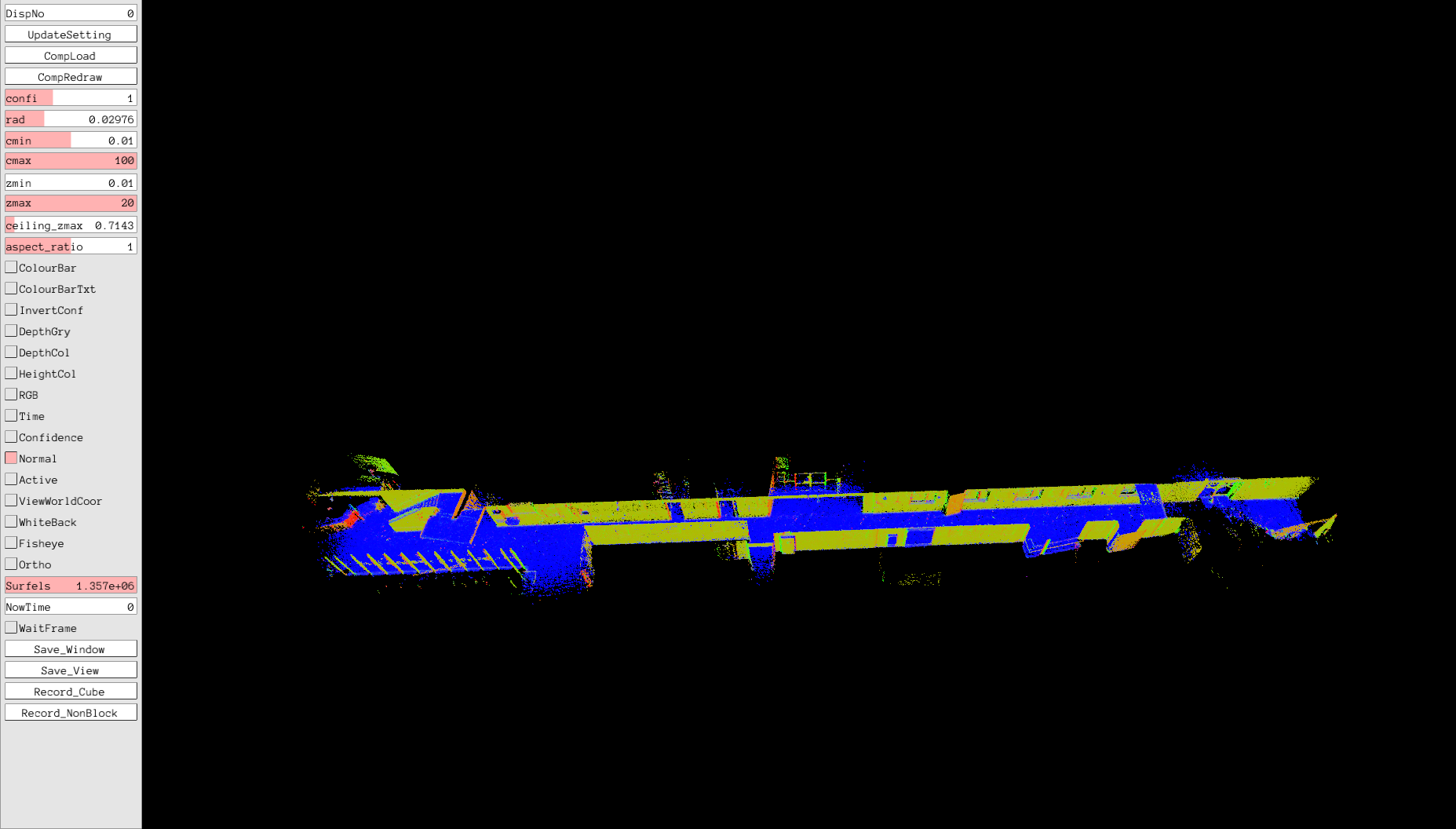
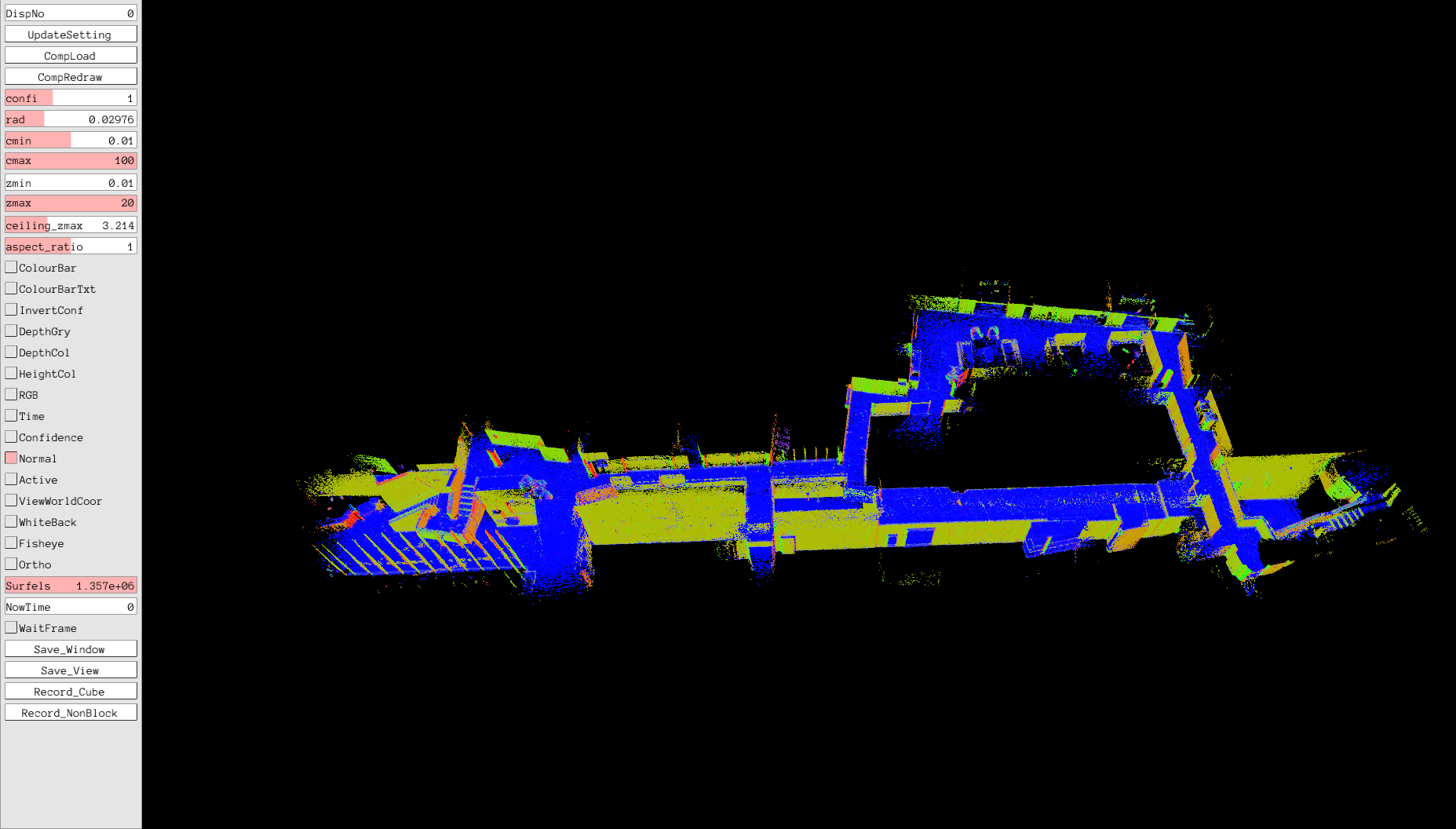
Some of the demo figures





- Related meterials
- Paper download
- Poster download
- Presentation download